
关于谛听
针对工业现场环境恶劣、地形复杂(比如楼梯、管道、狭窄空间)、任务多样等特点,谛听S10通过智能图像识别、多模态融合自主定位、真彩色环境建模、⾃适应避障/越障、基于大模型的数据分析、多类型机器人协同等技术,为行业⽤户提供远程场景监控、实时环境监测、智能巡检分析、应急事件处置等功能,实现态势全面感知、信息深度融合、行动自主决策、数据智能应⽤,辅助客户提高巡检效率和质量、缩减人力成本、降低安全风险、消除现场隐患,推动千行百业迈进自主运行、全年无休、数据驱动、智能领航的智慧巡检新时代。探索无界
跨越险阻、如履平地
轻松跨越22cm楼梯、碎⽯等地形,最大速度≥4m/s
通过0.6m宽的狭窄空间,长宽1000*470mm
适应45°斜坡
决策无忧
数智赋能辅助决策
基于大语言模型的人机交互和数据分析
决策综合效率提升30%
数据分析灵活性提升80%
航天品质
高可靠、高安全
军工级“6性”设计,工作温度-30°C~55°C
适应高低温、盐雾等恶劣环境,防水等级IP67
防跌落设计,防滑设计
持久动能
超长续航、自主充电
最大负载不小于20kg,作业超过2.5~4⼩时
充电路线自主规划
火眼金睛
高精度异常检测
异常识别准确度可达99%以上
缺陷识别尺寸可达毫米级
跨域协同
空地协同、全域覆盖
覆盖室内、厂区、广域三类场景
边缘自主化+云端一体化两级协同
谛听为智慧巡检带来了什么

巡检盲区全覆盖
支持各种复杂地形,可覆盖人工及传统巡检
设备无法到达的盲区,及时发现潜在缺陷,
保障目标场所整体安全

准确性大幅提升
依靠先进的传感器和智能分析技术,实现高
精度的故障识别,保证巡检结果准确性和一
致性,避免由于人为因素引起的差错

24小时全天候作业
支持24*7不间断地执行任务,而无需休息或
轮班,从而提高巡检的效率。可以在短时间
内完成大量的巡检工作,减少人力成本和时间消耗

避免人员安全风险
代替人员进入危险或恶劣环境执行任务,避
免人员受到高温、低温、辐射等危险因素
伤害,尊重员工生命安全,减少企业用工风险

综合成本显著降低
无需支付连续的人员工资和福利,也不需要
考虑人员轮换和培训成本。一次投资,长期回报

数智化转型升级
发挥数据价值,为企业提供设备升级、工艺
改进、运营管理等智能化决策支持,助推企
业综合效益提升
端云协同 数智赋能
满足多场景、多业务、跨设备巡检需求的新一代解决方案
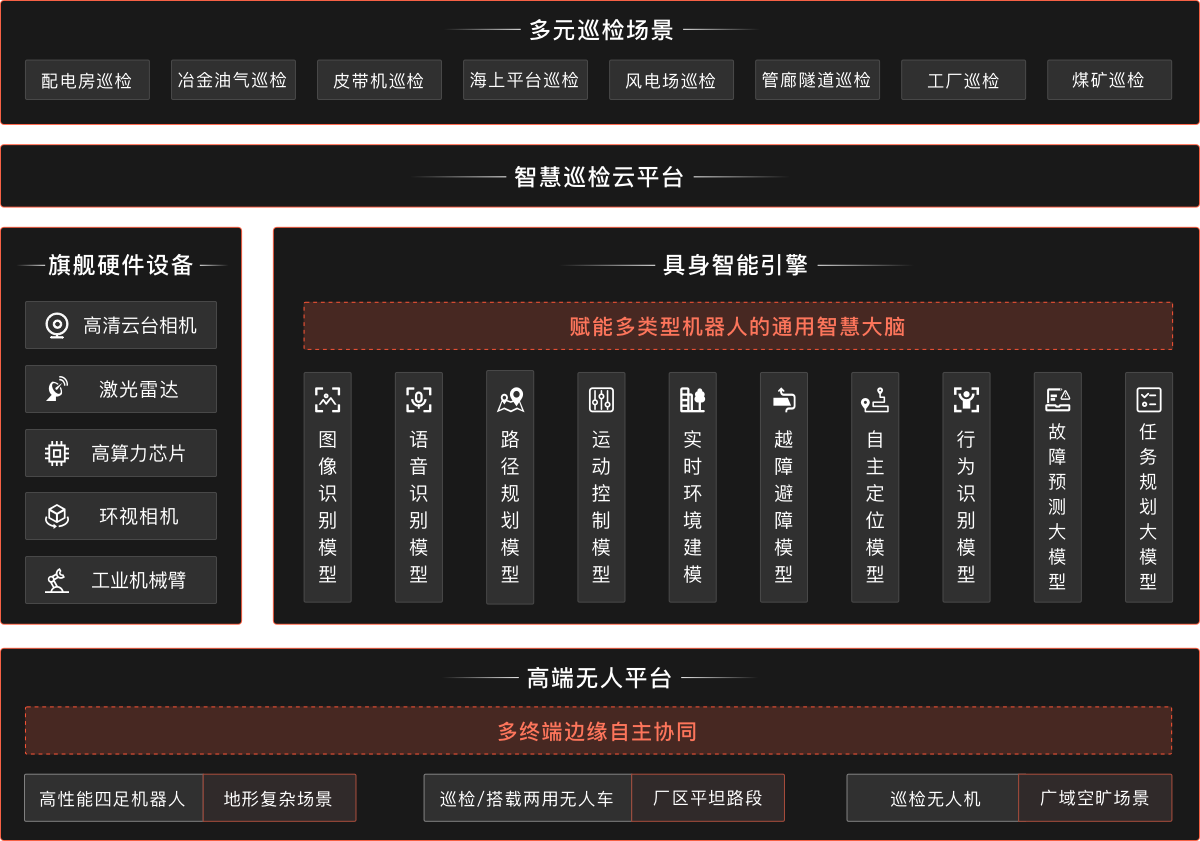
性能领航 守护无忧
高性能、可组合的新一代四足机器人巡检终端
综合集成 科学管控
基于大模型和数字孪生的智慧巡检综合管控平台

基于AI大脑的多场景巡检功能
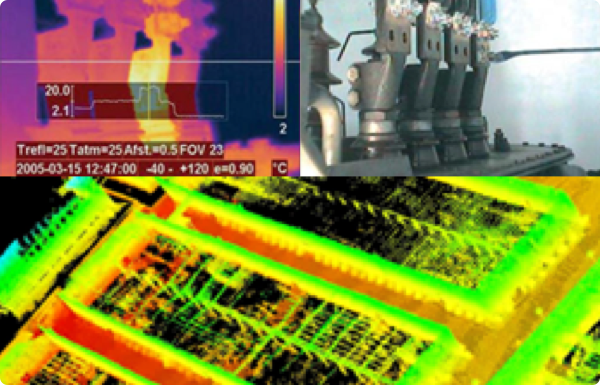
远程场景监控
基于双光摄像机实现可见光、红外同步成像,实现对工业现场情况的实时远程监控,基于激光雷达、相机与IMU,完成环境空间信息的真彩色实时建模。实时环境监测
基于高精度传感器模组,实现温度、湿度、噪音、PM2.5、有害气体浓度等环境数据监测。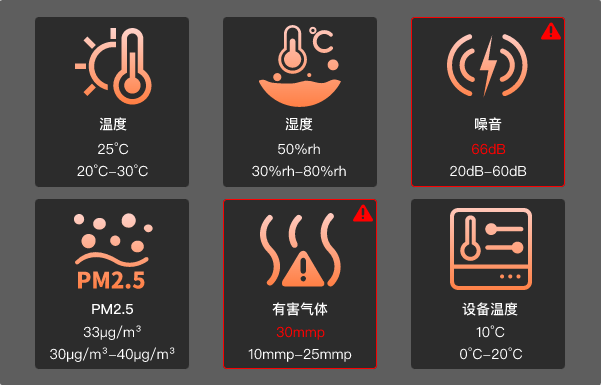

智能巡检分析
基于自主研发的人工智能算法,结合各类传感器数据综合分析,实现表计读取、结构缺陷识别、设备健康管理、人员行为分析等无人巡检功能,对异常情况自动报警,并支持形成巡检报告。应急事件处置
基于四足机器人自身的高性能运动和承载能力,结合可选配的七自由度机械臂,实现物资运送、应急引导、操作处置等功能。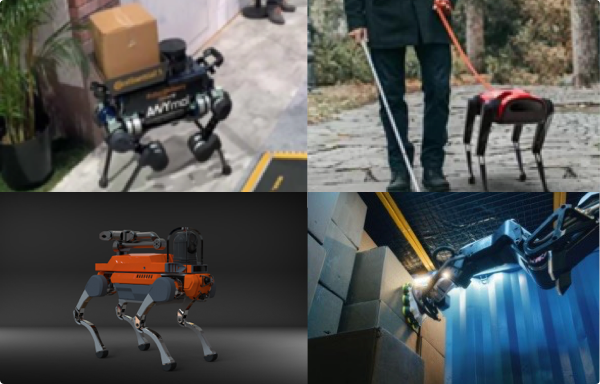
关键技术
通过前沿技术创新为多类型通用机器人接入高级智能大脑+小脑

基于异构传感器的融合自主定位技术
采用激光雷达、相机、IMU、北斗等异构传感器,实现室内外一体化的定位导航方案。结合高精度定位校正技术,巡检点定位误差可达毫米级。

真彩色实时环境建模技术
采用激光雷达与IMU,完成环境空间信息的实时重建;结合激光雷达、相机与位姿信息,构建真彩色环境模型,提升环境三维模型的辨识度。
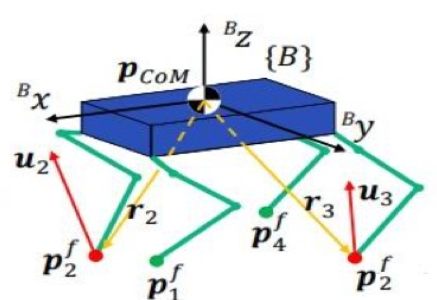
基于落足点识别与强化学习的越障与操控技术
基于深度学习智能识别与危险动作预测技术,实时分析复杂地形中的落足点;利用强化学习技术,使机器人自适应完成腿足控制与机械臂操作。

基于大语言模型的人机交互和数据分析
基于大语言模型的智能交互与规划技术,使巡检系统具备智能任务规划、 故障预测预警等能⼒。
![]()
定义智慧巡检 期待与您同行
版权所有©河北雄安青羽科技有限公司